SEARCH
検索詳細

若生 将史大学院システム情報学研究科 システム情報学専攻准教授
研究者基本情報
■ 学位■ 研究キーワード
■ 研究分野
■ 委員歴
- 2025年03月 - 現在, 計測自動制御学会 制御部門, 幹事
- 2024年10月 - 現在, IEEE, 11th Conference on Control Technology and Applications, Publicity Co-Chair
- 2020年11月 - 現在, International Federation of Automatic Control Member, Technical Committee 2.6
- 2024年05月 - 2025年09月, 計測自動制御学会, SICE Festival, Associate editor
- 2019年07月 - 2025年06月, European Control Association, Member of Conference Editorial Board
- 2023年07月 - 2025年03月, SICE International Symposium on Control Systems 2024, Program Committee Member
- 2023年04月 - 2025年03月, 計測自動制御学会 制御部門, 制御理論部会 委員
- 2024年03月 - 2025年02月, 計測自動制御学会 制御部門, 副幹事
- 2022年06月 - 2024年05月, システム制御情報学会, 編集委員会 委員
- 2020年03月 - 2023年02月, 計測自動制御学会, 計測自動制御学会論文集 アソシエイトエディタ
- 2022年01月 - 2022年12月, 計測自動制御学会 制御部門, 広報委員会 委員長
- 2021年01月 - 2021年12月, 計測自動制御学会 制御部門, 広報委員会 副委員長
- 2020年06月 - 2021年03月, 計測自動制御学会 制御部門, 第8回 制御部門マルチシンポジウム 実行委員会 出版担当
- 2019年04月 - 2021年03月, 計測自動制御学会 関西支部, シンポジウム委員庶務
- 2018年04月 - 2019年03月, 計測自動制御学会, Publication Vice Chair of SICE Annual Conference 2018
研究活動情報
■ 受賞- 2024年07月 一般財団法人 敬愛まちづくり財団, 前之園記念若手優秀論文賞, Self-triggered stabilization of discrete-time linear systems with quantized state measurements
- 2022年01月 公益財団法人 高柳健次郎財団, 研究奨励賞, 遅延を考慮した制御システムのセキュリティ対策アルゴリズムの開発
- 2021年09月 計測自動制御学会, 著述賞, ネットワーク化制御,コロナ社,2019
- 2018年04月 船井情報科学振興財団, 2017年度 船井情報科学振興財団 研究奨励賞, 通信ネットワークを含む制御システムの解析・設計出版社・新聞社・財団等の賞
- 2018年03月 計測自動制御学会制御部門, 2017年度 計測自動制御学会制御部門 部門大会賞, 確率的な時間遅れを含むシステムの最適制御国内学会・会議・シンポジウム等の賞
- 2016年04月 ACM/IEEE, Best Paper Award of the ACM/IEEE 7th International Conference on Cyber-Physical Systems, SMT-Based observer design for cyber-physical systems under sensor attacks国際学会・会議・シンポジウム等の賞
- 2015年01月 計測自動制御学会関西支部, 2014年度 計測自動制御学会関西支部 支部長賞奨励賞, サンプル値切替システムの量子化フィードバック安定化国内学会・会議・シンポジウム等の賞
- 2014年03月 計測自動制御学会制御部門, 2013年度 計測自動制御学会制御部門 研究奨励賞, 安定なコントローラによるむだ時間系の混合感度低減化国内学会・会議・シンポジウム等の賞
- 2014年02月 計測自動制御学会, 計測自動制御学会学会賞 学術奨励賞, 安定なコントローラによるむだ時間系の混合感度低減化国内学会・会議・シンポジウム等の賞
- 2012年11月 システム制御情報学会, 第55回自動制御連合講演会 優秀発表賞, Skew Toeplitzアプローチによる無限次元システムの強安定・感度低減化国内学会・会議・シンポジウム等の賞
- Institute of Electrical and Electronics Engineers (IEEE), 2025年10月, IEEE Transactions on Automatic Control, 70(10) (10), 6625 - 6640, 英語[査読有り]研究論文(学術雑誌)
- Institute of Electrical and Electronics Engineers (IEEE), 2025年08月, IEEE Transactions on Automatic Control, 70(8) (8), 5254 - 5269, 英語[査読有り]研究論文(学術雑誌)
- Elsevier BV, 2025年08月, Journal of Functional Analysis, 289(3) (3), 1 - 55, 英語[査読有り]研究論文(学術雑誌)
- The Society of Instrument and Control Engineers, 2024年08月, 計測自動制御学会論文集, 60(8) (8), 464 - 475, 日本語[査読有り]研究論文(学術雑誌)
- Abstract Let $$-A$$ be the generator of a bounded $$C_0$$-semigroup $$(e^{-tA})_{t \ge 0}$$ on a Hilbert space. First we study the long-time asymptotic behavior of the Cayley transform $$V_{\omega }(A) :=(A-\omega I) (A+\omega I)^{-1}$$ with $$\omega >0$$. We give a decay estimate for $$\Vert V_{\omega }(A)^nA^{-1}\Vert $$ when $$(e^{-tA})_{t \ge 0}$$ is polynomially stable. Considering the case where the parameter $$\omega $$ varies, we estimate $$\Vert (\prod _{k=1}^n V_{\omega _k}(A))A^{-1}\Vert $$ for exponentially stable $$C_0$$-semigroups $$(e^{-tA})_{t \ge 0}$$. Next we show that if the generator $$-A$$ of the bounded $$C_0$$-semigroup has a bounded inverse, then $$\sup _{t \ge 0} \Vert e^{-tA^{-1 } } A^{-\alpha } \Vert < \infty $$ for all $$\alpha >0$$. We also present an estimate for the rate of decay of $$\Vert e^{-tA^{-1 } } A^{-1} \Vert $$, assuming that $$(e^{-tA})_{t \ge 0}$$ is polynomially stable. To obtain these results, we use operator norm estimates offered by a functional calculus called the $$\mathcal {B}$$-calculus.Springer Science and Business Media LLC, 2024年05月, Journal of Evolution Equations, 24(2) (2), 1 - 34, 英語[査読有り]研究論文(学術雑誌)
- Elsevier BV, 2024年04月, Journal of Mathematical Analysis and Applications, 538(1) (1), 1 - 25, 英語[査読有り]研究論文(学術雑誌)
- The Society of Instrument and Control Engineers, 2023年12月, 計測自動制御学会論文集, 59(12) (12), 529 - 541, 日本語[査読有り]研究論文(学術雑誌)
- Abstract This paper is concerned with the decay rate of $$e^{A^{-1}t}A^{-1}$$ for the generator A of an exponentially stable $$C_0$$-semigroup on a Hilbert space. To estimate the decay rate of $$e^{A^{-1}t}A^{-1}$$, we apply a bounded functional calculus. Using this estimate and Lyapunov equations, we also study the quantified asymptotic behavior of the Crank-Nicolson scheme with smooth initial data. A similar argument is applied to a polynomially stable $$C_0$$-semigroup whose generator is normal.Springer Science and Business Media LLC, 2023年11月, Integral Equations and Operator Theory, 95(4) (4), 1 - 24, 英語[査読有り]研究論文(学術雑誌)
- Abstract This paper addresses the consensus problem of first‐order continuous‐time multi‐agent systems over undirected graphs. Each agent samples relative state measurements in a self‐triggered fashion and transmits the sum of the measurements to its neighbours. Moreover, we use finite‐level dynamic quantizers and apply the zooming‐in technique. The proposed joint design method for quantization and self‐triggered sampling achieves asymptotic consensus, and inter‐event times are strictly positive. Sampling times are determined explicitly with iterative procedures including the computation of the Lambert W‐function. A simulation example is provided to illustrate the effectiveness of the proposed method.Institution of Engineering and Technology (IET), 2023年10月, IET Control Theory & Applications, 18(4) (4), 511 - 529, 英語[査読有り]研究論文(学術雑誌)
- The Society of Instrument and Control Engineers, 2023年07月, 計測自動制御学会論文集, 59(7) (7), 330 - 341, 日本語[査読有り]研究論文(学術雑誌)
- Elsevier BV, 2023年07月, Automatica, 153, 1 - 9, 英語, 国際共著している[査読有り]研究論文(学術雑誌)
- We provide a partially affirmative answer to the following question on robustness of polynomial stability with respect to sampling: “Suppose that a continuous-time state-feedback controller achieves the polynomial stability of the infinite-dimensional linear system. We apply an idealized sampler and a zero-order hold to a feedback loop around the controller. Then, is the sampled-data system strongly stable for all sufficiently small sampling periods? Furthermore, is the polynomial decay of the continuous-time system transferred to the sampled-data system under sufficiently fast sampling?” The generator of the open-loop system is assumed to be a Riesz-spectral operator whose eigenvalues are not on the imaginary axis but may approach it asymptotically. We provide conditions for strong stability to be preserved under fast sampling. Moreover, we estimate the decay rate of the state of the sampled-data system with a smooth initial state and a sufficiently small sampling period.EDP Sciences, 2023年06月, ESAIM: Control, Optimisation and Calculus of Variations, 29, 1 - 42, 英語[査読有り]研究論文(学術雑誌)
- Institute of Electrical and Electronics Engineers (IEEE), 2023年05月, IEEE Control Systems Letters, 7, 1772 - 1777, 英語, 国際共著している[査読有り]研究論文(学術雑誌)
- Institute of Electrical and Electronics Engineers (IEEE), 2023年03月, IEEE Transactions on Automatic Control, 68(3) (3), 1776 - 1783, 英語[査読有り]研究論文(学術雑誌)
- Research Institute of Signal Processing, Japan, 2022年11月, Journal of Signal Processing, 26(6) (6), 147 - 158, 英語[査読有り]研究論文(学術雑誌)
- Institute of Electrical and Electronics Engineers (IEEE), 2022年07月, IEEE Transactions on Control Systems Technology, 30(4) (4), 1696 - 1710, 英語[査読有り]研究論文(学術雑誌)
- Abstract We introduce the notions of semi-uniform input-to-state stability and its subclass, polynomial input-to-state stability, for infinite-dimensional systems. We establish a characterization of semi-uniform input-to-state stability based on attractivity properties as in the uniform case. Sufficient conditions for linear systems to be polynomially input-to-state stable are provided, which restrict the range of the input operator depending on the rate of polynomial decay of the product of the semigroup and the resolvent of its generator. We also show that a class of bilinear systems are polynomially integral input-to-state stable under a certain smoothness assumption on nonlinear operators.Springer Science and Business Media LLC, 2022年06月, Mathematics of Control, Signals, and Systems, 34(4) (4), 789 - 817, 英語[査読有り]研究論文(学術雑誌)
- Informa UK Limited, 2022年06月, SICE Journal of Control, Measurement, and System Integration, 15(2) (2), 182 - 190, 英語[査読有り]研究論文(学術雑誌)
- 2022年05月, Proceedings of 13th Asian Control Conference, 1244 - 1245, 英語Quantized control of infinite-dimensional discrete-time systems with packet dropouts[査読有り]研究論文(国際会議プロシーディングス)
- Elsevier BV, 2022年04月, Systems & Control Letters, 162, 1 - 8, 英語[査読有り]研究論文(学術雑誌)
- American Institute of Mathematical Sciences (AIMS), 2022年03月, Mathematical Control and Related Fields, 12(1) (1), 245 - 273, 英語
<p style='text-indent:20px;'>This paper addresses the following question: "Suppose that a state-feedback controller stabilizes an infinite-dimensional linear continuous-time system. If we choose the parameters of an event/self-triggering mechanism appropriately, is the event/self-triggered control system stable under all sufficiently small nonlinear Lipschitz perturbations?" We assume that the stabilizing feedback operator is compact. This assumption is used to guarantee the strict positiveness of inter-event times and the existence of the mild solution of evolution equations with unbounded control operators. First, for the case where the control operator is bounded, we show that the answer to the above question is positive, giving a sufficient condition for exponential stability, which can be employed for the design of event/self-triggering mechanisms. Next, we investigate the case where the control operator is unbounded and prove that the answer is still positive for periodic event-triggering mechanisms.</p>
[査読有り]研究論文(学術雑誌) - Abstract In this paper, we study the decay rate of the Cayley transform of the generator of a polynomially stable $$C_0$$-semigroup. To estimate the decay rate of the Cayley transform, we develop an integral condition on resolvents for polynomial stability. Using this integral condition, we relate polynomial stability to Lyapunov equations. We also study robustness of polynomial stability for a certain class of structured perturbations.Springer Science and Business Media LLC, 2021年12月, Journal of Evolution Equations, 21(4) (4), 4575 - 4597, 英語[査読有り]研究論文(学術雑誌)
- Society for Industrial & Applied Mathematics (SIAM), 2021年10月, SIAM Journal on Control and Optimization, 59(5) (5), 3498 - 3523, 英語[査読有り]研究論文(学術雑誌)
- Institute of Electrical and Electronics Engineers (IEEE), 2021年10月, IEEE Transactions on Automatic Control, 66(10) (10), 4982 - 4989, 英語[査読有り]研究論文(学術雑誌)
- In a secret communication system using chaotic synchronization, the communication information is embedded in a signal that behaves as chaos and is sent to the receiver to retrieve the information. In a previous study, a chaotic synchronous system was developed by integrating the wave equation with the van der Pol boundary condition, of which the number of the parameters are only three, which is not enough for security. In this study, we replace the nonlinear boundary condition with an artificial neural network, thereby making the transmitted information difficult to leak. The neural network is divided into two parts; the first half is used as the left boundary condition of the wave equation and the second half is used as that on the right boundary, thus replacing the original nonlinear boundary condition. We also show the results for both monochrome and color images and evaluate the security performance. In particular, it is shown that the encrypted images are almost identical regardless of the input images. The learning performance of the neural network is also investigated. The calculated Lyapunov exponent shows that the learned neural network causes some chaotic vibration effect. The information in the original image is completely invisible when viewed through the image obtained after being concealed by the proposed system. Some security tests are also performed. The proposed method is designed in such a way that the transmitted images are encrypted into almost identical images of waves, thereby preventing the retrieval of information from the original image. The numerical results show that the encrypted images are certainly almost identical, which supports the security of the proposed method. Some security tests are also performed. The proposed method is designed in such a way that the transmitted images are encrypted into almost identical images of waves, thereby preventing the retrieval of information from the original image. The numerical results show that the encrypted images are certainly almost identical, which supports the security of the proposed method.MDPI AG, 2021年07月, Entropy, 23(7) (7), 904 - 904, 英語[査読有り]研究論文(学術雑誌)
- 2021年04月, Proceedings of the 93rd IEEE Vehicular Technology Conference, 英語Harvest-then-transmit-based TDMA protocol with statistical channel state information for wireless powered sensor networks[査読有り]研究論文(国際会議プロシーディングス)
- 2020年08月, IEEE Transactions on Automatic Control, 65(8) (8), 3560 - 3575, 英語[査読有り]研究論文(学術雑誌)
- 2020年04月, Systems & Control Letters, 138, 1 - 8, 英語Stability analysis of perturbed infinite-dimensional sampled-data systems[査読有り]研究論文(学術雑誌)
- 2020年02月, SIAM Journal on Control and Optimization, 58(2) (2), 605 - 635, 英語Event-triggered control of infinite-dimensional systems[査読有り]研究論文(学術雑誌)
- 2020年01月, IEEE Transactions on Automatic Control, 65(1) (1), 404 - 411, 英語An LMI approach to stability analysis of coupled parabolic systems[査読有り]研究論文(学術雑誌)
- 2020年01月, Mathematics of Control, Signals, and Systems, 32(1) (1), 1 - 58, 英語Sampled-data output regulation of well-posed infinite-dimensional systems with constant reference and disturbance signals[査読有り]研究論文(学術雑誌)
- 2019年12月, Dynamic Games and Applications, 9(4) (4), 965 - 983, 英語Supervisory control of discrete-event systems under attacks[査読有り]研究論文(学術雑誌)
- Institution of Engineering and Technology (IET), 2019年12月, IET Electric Power Applications, 13(12) (12), 2044 - 2051, 英語[査読有り]研究論文(学術雑誌)
- Institute of Electrical and Electronics Engineers Inc., 2019年09月, IEEE Vehicular Technology Conference, 2019-, 英語研究論文(国際会議プロシーディングス)
- 2019年09月, 計測自動制御学会論文集, 55(9) (9), 582 - 584, 日本語非局所境界条件に無駄時間を含む1階双曲型システムに対するオブザーバ:誤差システムのL2-安定性[査読有り]研究論文(学術雑誌)
- 2019年07月, Japan Journal of Industrial and Applied Mathematics, 36(2) (2), 325 - 355, 英語Boundary stabilization of first-order hyperbolic equations with input delay[査読有り]研究論文(学術雑誌)
- 2019年07月, IEEE Transactions on Automatic Control, 64(7) (7), 2929 - 2936, 英語[査読有り]研究論文(学術雑誌)
- Institute of Electrical and Electronics Engineers (IEEE), 2019年06月, IEEE Transactions on Green Communications and Networking, 3(2) (2), 329 - 342, 英語[査読有り]研究論文(学術雑誌)
- 2018年10月, Proceedings of the 17th IFAC Workshop on Control Applications of Optimization, 456 - 461, 英語Backstepping observers for two linearized Kermack-McKendrick models[査読有り]研究論文(国際会議プロシーディングス)
- Institute of Electrical and Electronics Engineers Inc., 2018年06月, IEEE Transactions on Automatic Control, 63(6) (6), 1618 - 1633, 英語[査読有り]研究論文(学術雑誌)
- 2018年06月, Proceedings of the 2018 American Control Conference, 英語Simultaneous optimization of statistical model and control input plan[査読有り]研究論文(国際会議プロシーディングス)
- 2018年06月, Proceedings of the 2018 American Control Conference, 英語Quantized output feedback stabilization under DoS attacks[査読有り]研究論文(国際会議プロシーディングス)
- 2018年05月, Proceedings of the IEEE International Conference on Communications 2018, 英語Model predictive cell zooming for energy-harvesting small cell networks[査読有り]研究論文(国際会議プロシーディングス)
- 2018年01月, IEEE Control Systems Letters, 2(1) (1), 157 - 162, 英語Stability analysis and l2-gain of adaptive control systems with event-triggered try-once-discard protocols[査読有り]研究論文(学術雑誌)
- 2018年, SIAM J. Control and Optimization, 56(4) (4), 2634 - 2661, 英語[査読有り]研究論文(学術雑誌)
- 2017年12月, IET Control Theory and Applications, 11(12) (12), 1913 - 1921, 英語Stabilization of switched systems with sampled and quantized output feedback[査読有り]研究論文(学術雑誌)
- 2017年08月, 電気学会論文誌B(電力・エネルギー部門誌), 137(8) (8), 596 - 597, 日本語H∞制御による電力貯蔵装置の容量低減化[査読有り]研究論文(学術雑誌)
- 2017年07月, Automatica, 81(7) (7), 314 - 321, 英語[査読有り]研究論文(学術雑誌)
- 2017年07月, Proceedings of the 36th Chinese Control Conference, 英語Stability and performance analysis of receding horizon quantizer in single-input system[査読有り]研究論文(国際会議プロシーディングス)
- 2017年07月, Proceedings of the 20th IFAC World Congress, 英語Quantized Output Feedback Stabilization by Luenberger Observer[査読有り]研究論文(国際会議プロシーディングス)
- 2017年07月, Proceedings of the 36th Chinese Control Conference, 英語Design of Networked Control Systems in Consideration of quantization error and channel capacity[査読有り]研究論文(国際会議プロシーディングス)
- 2017年06月, IEEE Transactions on Automatic Control, 62(6) (6), 2958 - 2964, 英語[査読有り]研究論文(学術雑誌)
- 2017年05月, PHYSICAL REVIEW E, 95(5) (5), 1 - 8, 英語[査読有り]研究論文(学術雑誌)
- 2017年02月, Proceedings of the 5th International Conference on System Modeling and Optimization, 英語Estimation of network traffic status for networked control systems with data dropout and its control[査読有り]研究論文(国際会議プロシーディングス)
- IEEE, 2017年, Proceedings of the 2017 American Control Conference, 1978 - 1983, 英語[査読有り]研究論文(国際会議プロシーディングス)
- 2016年12月, 2016 IEEE 55th Conference on Decision and Control, CDC 2016, 4178 - 4183, 英語[査読有り]研究論文(国際会議プロシーディングス)
- 2016年07月, AUTOMATICA, 69(7) (7), 157 - 168, 英語[査読有り]研究論文(学術雑誌)
- 2016年, 2016 ACM/IEEE 7TH INTERNATIONAL CONFERENCE ON CYBER-PHYSICAL SYSTEMS (ICCPS), 英語SMT-Based Observer Design for Cyber-Physical Systems Under Sensor Attacks[査読有り]研究論文(国際会議プロシーディングス)
- 2016年, 2016 AMERICAN CONTROL CONFERENCE (ACC), 4239 - 4244, 英語L-2-Gain Analysis of Systems with Clock Offsets[査読有り]研究論文(国際会議プロシーディングス)
- 2016年, 2016 AMERICAN CONTROL CONFERENCE (ACC), 709 - 714, 英語L-2-Gain Analysis of Regenerative Switched Linear Systems with Sampled-Data State-Feedback Control[査読有り]研究論文(国際会議プロシーディングス)
- 2016年, 2016 19TH INTERNATIONAL CONFERENCE ON ELECTRICAL MACHINES AND SYSTEMS (ICEMS 2016), 英語Electrical angle estimation of rotor for PMSM in model predictive current control[査読有り]研究論文(国際会議プロシーディングス)
- 2016年, 2016 IEEE 55TH CONFERENCE ON DECISION AND CONTROL (CDC), 5962 - 5967, 英語Robust Stability under Asynchronous Sensing and Control[査読有り]研究論文(国際会議プロシーディングス)
- 2016年, 2016 ACM/IEEE 7TH INTERNATIONAL CONFERENCE ON CYBER-PHYSICAL SYSTEMS (ICCPS), 2(1) (1), 1 - 27, 英語SMT-Based Observer Design for Cyber-Physical Systems Under Sensor Attacks[査読有り]研究論文(国際会議プロシーディングス)
- 2015年04月, Proceedings of the 18th International Conference on Hybrid Systems: Computation and Control, 英語Real-time control under clock offsets between sensors and controllers[査読有り]研究論文(国際会議プロシーディングス)
- 2015年, 2015 AMERICAN CONTROL CONFERENCE (ACC), 3522 - 3527, 英語Stabilization of Networked Control Systems with Clock Offsets[査読有り]研究論文(国際会議プロシーディングス)
- 2015年, 2015 AMERICAN CONTROL CONFERENCE (ACC), 2439 - 2444, 英語Observability of linear systems under adversarial attacks[査読有り]研究論文(国際会議プロシーディングス)
- 2015年, 2015 54TH IEEE CONFERENCE ON DECISION AND CONTROL (CDC), 1601 - 1606, 英語Stabilization of Discrete-time Piecewise Affine Systems with Quantized Signals[査読有り]研究論文(国際会議プロシーディングス)
- 2015年, 2015 54TH IEEE CONFERENCE ON DECISION AND CONTROL (CDC), 6886 - 6891, 英語Control under Clock Offsets and Actuator Saturation[査読有り]研究論文(国際会議プロシーディングス)
- 2014年12月, Proceedings of the 53rd IEEE Conference on Decision and Control, 3892 - 3897, 英語Output Feedback Stabilization of Switched Linear Systems with Limited Information[査読有り]研究論文(国際会議プロシーディングス)
- 2014年10月, Systems & Control Letters, 72(10) (10), 80 - 85, 英語[査読有り]研究論文(学術雑誌)
- 2014年08月, Proceedings of the 19th IFAC World Congress, 9979 - 9984, 英語Quantized feedback stabilization of sampled-data switched linear systems[査読有り]研究論文(国際会議プロシーディングス)
- 2014年07月, Proceedings of the 21st International Symposium on Mathematical Theory of Networks and Systems, 英語Quantized output feedback stabilization of switched linear systems[査読有り]研究論文(国際会議プロシーディングス)
- 2014年04月, IEEE TRANSACTIONS ON AUTOMATIC CONTROL, 59(4) (4), 1099 - 1105, 英語[査読有り]研究論文(学術雑誌)
- 2013年, Systems and Control Letters, 62(6) (6), 511 - 516, 英語[査読有り]研究論文(学術雑誌)
- 2013年, 2013 IEEE 52ND ANNUAL CONFERENCE ON DECISION AND CONTROL (CDC), 1065 - 1070, 英語Mixed Sensitivity Reduction for Time-Delay Systems by Stable Controllers[査読有り]研究論文(国際会議プロシーディングス)
- 2012年08月, IEEE TRANSACTIONS ON AUTOMATIC CONTROL, 57(8) (8), 2089 - 2094, 英語[査読有り]研究論文(学術雑誌)
- 2012年07月, Proceedings of the 20th International Symposium on Mathematical Theory of Networks and Systems, 英語Robust stabilization for distributed parameter systems by stable controllers[査読有り]研究論文(国際会議プロシーディングス)
- 2012年, 2012 IEEE 51ST ANNUAL CONFERENCE ON DECISION AND CONTROL (CDC), 1584 - 1590, 英語Tangential Nevanlinna-Pick Interpolation for Strong Stabilization of MIMO Distributed Parameter Systems[査読有り]研究論文(国際会議プロシーディングス)
- 2024年06月, システム/制御/情報, 68(6) (6), 205 - 205, 日本語「制御とネットワークが交差する数理的研究」特集号を企画して記事・総説・解説・論説等(その他)
- 2024年05月, 数理科学, 62(6) (6), 66 - 66, 日本語書評:佐藤一宏著 線形代数を基礎とする応用数理入門 最適化理論・システム制御理論を中心に書評論文,書評,文献紹介等
- 2023年03月, システム/制御/情報, 67(3) (3), 127 - 127, 日本語The 25th International Symposium on Mathematical Theory of Networks and Systemsに参加して会議報告等
- 2021年08月, システム/制御/情報, 65(8) (8), 305 - 310, 日本語分布定数系のカオスとその応用について[査読有り]記事・総説・解説・論説等(学術雑誌)
- 2021年06月, 計測と制御, 60(6) (6), 369 - 374, 日本語強連続半群と制御理論[査読有り]記事・総説・解説・論説等(学術雑誌)
- 2019年11月, システム/制御/情報, 63(11) (11), 455 - 460, 日本語イベントトリガ制御の基礎[査読有り]記事・総説・解説・論説等(学術雑誌)
- 公益社団法人 計測自動制御学会, 2017年07月, 計測と制御, 56(7) (7), 486 - 491, 日本語[査読有り]記事・総説・解説・論説等(学術雑誌)
- 公益社団法人 計測自動制御学会, 2016年11月, 計測と制御, 55(11) (11), 984 - 989, 日本語[査読有り]記事・総説・解説・論説等(学術雑誌)
- 公益社団法人 計測自動制御学会, 2014年11月, 計測と制御, 53(11) (11), 1048 - 1048, 日本語[査読有り]記事・総説・解説・論説等(学術雑誌)
■ 講演・口頭発表等
- Online Seminar on Input-to-State Stability and its Applications, 2023年08月, 英語Semi-uniform ISS and iISS of infinite-dimensional systems[招待有り]口頭発表(招待・特別)
- IFAC WC 2023 Workshop ''A Showcase of LMI-Based Methods for Analysis, Control and Estimation of PDEs, 2023年07月, 英語LMI-based stability analysis of coupled multi-dimensional parabolic PDEs[招待有り]口頭発表(招待・特別)
- 2022年度 応用数学合同研究集会, 2022年12月, 日本語安定な強連続半群の有理関数近似の減衰率口頭発表(一般)
- 25th International Symposium on Mathematical Theory of Networks and Systems, 2022年09月, 英語On Semi-uniform input-to-state stability and polynomial input-to-state stability口頭発表(一般)
- 6th IEEE Conference on Control Technology and Applications, 2022年08月, 英語Cell zooming with masked data for off-grid small cell networks: Distributed optimization approach口頭発表(一般)
- 第9回制御部門マルチシンポジウム ワークショップ「DX 時代のイベントベースト制御理論 :異分野との架橋」, 2022年03月, 日本語無限次元システムの事象駆動型 ・自己駆動型制御シンポジウム・ワークショップパネル(指名)
- 2022年電子情報通信学会総合大会, 2022年03月, 日本語食事シナリオを考慮した血糖値のロバストモデル予測制御口頭発表(一般)
- 第8回計測自動制御学会制御部門マルチシンポジウム, 2021年03月, 日本語入出力依存の重みを用いたモデル予測型血糖値制御口頭発表(一般)
- 大阪大学MMDモデリング部門主催ワークショップ「工学と数学の接点を求めて」, 2020年11月無限次元系のサンプル値制御シンポジウム・ワークショップパネル(指名)
- 第63回自動制御連合講演会, 2020年11月DoS攻撃の下での無限次元システムの量子化制御口頭発表(一般)
- 2020年度 日本数学会秋季総合分科会, 2020年09月, 日本語Robustness of strong stability with respect to sampling口頭発表(一般)
- 第64回システム制御情報学会研究発表講演会, 2020年05月潜伏期間と観測遅れを伴うKermack-McKendrick モデルに対する状態推定口頭発表(一般)
- 第64回システム制御情報学会研究発表講演会, 2020年05月無限次元系に対する自己駆動制御口頭発表(一般)
- 2019年度 応用数学合同研究集会, 2019年12月, 日本語無限次元系のイベント駆動制御について口頭発表(一般)
- 2019年度 応用数学合同研究集会, 2019年12月, 日本語観測遅れを伴う Kermack-McKendrick モデルに対する状態推定口頭発表(一般)
- 第6回計測自動制御学会制御部門マルチシンポジウム, 2019年03月, 日本語, 国内会議非局所境界条件にむだ時間を含む1階双曲型システムに対するオブザーバ設計と誤差システムのL2-安定性ポスター発表
- 2018年度 応用数学合同研究集会, 2018年12月, 日本語, 国内会議無限次元システムのサンプル値サーボ問題について口頭発表(一般)
- 2018年度 応用数学合同研究集会, 2018年12月, 日本語, 大津, 国内会議境界入力に無駄時間要素を含む1階双曲型システムの安定化について口頭発表(一般)
- IEICE Smartcom 2018, 2018年10月, 英語, 国際会議Q-Learning based Cell Zooming for Energy-Harvesting Small Cell Networksポスター発表
- 日本応用数理学会2018年 年会, 2018年09月, 日本語, 名古屋, 国内会議非局所境界条件にむだ時間を含む双曲型システムに対する状態推定口頭発表(一般)
- SICE Annual Conference 2018 Workshop ''New Trends in Networked Control', 2018年09月, 英語, 国際会議Event-triggered control systemsシンポジウム・ワークショップパネル(指名)
- 第61回システム制御情報学会研究発表講演会, 2018年05月, 日本語, 国内会議DoS攻撃の下での量子化制御口頭発表(一般)
■ 共同研究・競争的資金等の研究課題
- 日本学術振興会, 科学研究費助成事業, 基盤研究(C), 神戸大学, 2024年04月 - 2029年03月, 研究代表者無限次元デジタル制御系のための解析・設計理論の構築
- 日本学術振興会, 科学研究費助成事業 若手研究, 若手研究, 神戸大学, 2020年04月01日 - 2024年03月31日無限次元サンプル値系のロバスト安定性解析2021年度は,制御作用素が非有界である無限次元線形サンプル値系を対象とし,非有界摂動に対するロバスト安定性解析について研究を行った.非有界な制御作用素は,偏微分方程式系の境界制御問題を抽象的発展方程式の枠組みで表現する際に必要となる.一般に,制御作用素が入力空間から状態空間への有界作用素であるときに,その制御作用素は有界であるという.これに対して本研究では,状態空間を内包する外挿空間を考え,入力空間から外挿空間への有界作用素として制御作用素が与えられる場合を考えた. また非有界な摂動として,Desch-Shappacher型の摂動を取り扱った.偏微分方程式系の境界条件に摂動が加わった場合,その系を抽象的発展方程式に書き直すと,境界条件の摂動はDesch-Shappacher型の摂動となる.また,個体群動態に関する微分方程式や遅延微分方程式の解析にもDesch-Shappacher型の摂動が用いられることがある.Desch-Shappacher型の摂動が持つ非有界性は,上で述べた制御作用素と同様(状態空間から)外挿空間への作用素であることに由来する. 本研究の困難は,制御作用素と摂動の非有界性が複合的に系のダイナミクスに影響を与える点である.実際,制御作用素の終集合である外挿空間は系の生成作用素に依存するが,その生成作用素は摂動によって変化してしまう.まずDesch-Shappacher型の摂動によって外挿空間が変化しないことを示した.次に,生成作用素のレゾルベントが外挿空間から状態空間への有界作用素であることを利用して,サンプリング時刻間での状態の遷移を表す作用素が摂動によってどのように変化するか解析した.この解析により,Desch-Shappacher型の摂動が十分小さければ,サンプル値系の指数安定性が保存されることを明らかにした.
- 学術研究助成基金助成金/若手研究(B), 2017年04月 - 2020年03月, 研究代表者競争的資金
- 科学研究費助成事業/特別研究員奨励費, 2013年04月 - 2015年03月, 研究代表者競争的資金
研究シーズ
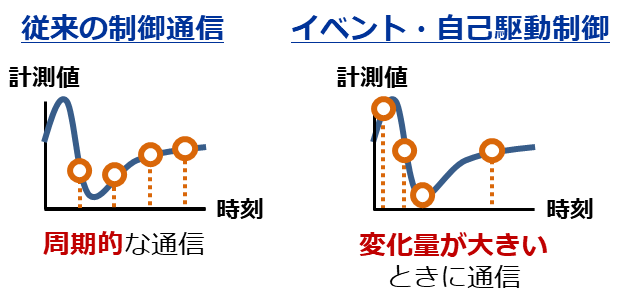
■ 研究シーズ- 通信ネットワークを介した制御システムの解析・設計シーズカテゴリ:情報通信, ものづくり技術(機械・電気電子・化学工業), 自然科学一般研究キーワード:制御工学, 通信工学, IoT, セキュリティ研究の背景と目的:IoT技術の導入により、センサなどの制御システムの構成要素が、通信ネットワークを介して複合的に連携するようになりました。また、制御システムに汎用的なネットワーク技術が採用され、オープン化が進んでいます。そのため、制御通信の省電力化や制御システムのセキュリティが重要になっています。制御工学と通信工学の数理的研究を軸に、今後のIoT 社会の安全を支える基盤技術を開発することを目的としています。研究内容:1:IoTデバイスと通信ネットワークを活用した制御の技術的課題の1つとして、制御通信で消費される電力の削減が挙げられます。従来の制御通信では、センサの計測値は周期的に送信されていました。しかし、これでは計測値がほとんど変化しない場合でも通信が行われることになり、電力を不必要に消費してしまいます。そのため、変化量が大きくなったときだけ計測値を送信する、イベント駆動制御・自己駆動制御(下図)の研究を行っています。2:近年、制御システムがサイバー攻撃の標的になる機会が増え、そのセキュリティ対策が喫緊の課題になっています。従来の情報システムのセキュリティと異なり、制御システムのセキュリティでは継続稼動の可用性が重視されるなど、新しい対策が必要となります。そこで、サイバー攻撃によるセンサ情報の改ざんやパケット損失のもとでも、安全にシステムが稼働するための制御アルゴリズムを考案しました。
通信時刻の決定方法の違い
 期待される効果や応用分野:本研究では個別のシステムに焦点を当てるのではなく、状態方程式という抽象的なシステムの表現法に基づいて、制御アルゴリズムを構築しています。そのため、提案手法は様々なシステムに適用可能です。工場設備や電力インフラなどの大規模制御システムが主要な応用先ですが、車の自動運転やドローンの運転へ適用することで,省電力化の促進や致命的な事故の防止が期待できます。関係する業績:永原正章(編著)、岡野訓尚、小蔵正輝、若生将史(共著)、ネットワーク化制御、コロナ社、2019。 https://www.coronasha.co.jp/np/isbn/9784339032277/
期待される効果や応用分野:本研究では個別のシステムに焦点を当てるのではなく、状態方程式という抽象的なシステムの表現法に基づいて、制御アルゴリズムを構築しています。そのため、提案手法は様々なシステムに適用可能です。工場設備や電力インフラなどの大規模制御システムが主要な応用先ですが、車の自動運転やドローンの運転へ適用することで,省電力化の促進や致命的な事故の防止が期待できます。関係する業績:永原正章(編著)、岡野訓尚、小蔵正輝、若生将史(共著)、ネットワーク化制御、コロナ社、2019。 https://www.coronasha.co.jp/np/isbn/9784339032277/
wakaiki ruby.kobe-u.ac.jp ※左記の「@」は画像ですので、ご利用の際はテキストの「@」を入力してください。
ruby.kobe-u.ac.jp ※左記の「@」は画像ですので、ご利用の際はテキストの「@」を入力してください。
ruby.kobe-u.ac.jp ※左記の「@」は画像ですので、ご利用の際はテキストの「@」を入力してください。